Bug #20752

Rovers veer to the right when moving forward/back with control point set to up
10%
Description
I've notice some strange behaviour of the Mk2 Lander Can rover variant, when driven around.
The behaviour is that when powered is applied the vehicle veers strongly to the right, as if the center of mass of the Lander Can is off center (although it appears centered in the VAB).
The detail of the behaviour is that from a standing start the vehicle pulls a few degrees to the right, then continues straight ahead until a certain speed is reach at which point it steers continuously in a steady right turn.
I tried out both the RoveMax Model M1 and the TR-2L wheels and both had the same behaviour. I tested out the RoveMax with some different bodies for the rover (Mk1 Cockpit with a Structural Fuselage as well as Mk1 Lander Can and some girders) and those behaved normally.
Something else I noticed was that the Mk2 Lander Can based rover exhibited much stronger movement of the suspension that the other designs, regardless of whether they were lighter or heavier than it. It was generally bouncy as well as a pronounced dive down at the front when accelerating (opposite of what I'd expect) and down at the back when braking.
All the wheel settings were default and the wheel positions were definitely symmetrical (positioned then snapped into place after to be sure) for all vehicles tested.
This was in a fresh install to a new folder.
I've attached a couple of pics of to show what I mean.
| screenshot2.png (1.82 MB) screenshot2.png | Accelerating | ||
| screenshot3.png (1.76 MB) screenshot3.png | Braking | ||
| screenshot707.png (2.18 MB) screenshot707.png | Rover reversed off initial runway position with control point set to up |



History
#1
 Updated by Anonymous almost 6 years ago
Updated by Anonymous almost 6 years ago
I do not notice any pull to the right or left; you might need to attach a craft file to let others see the problem.
The suspension flex is probably the unusually-large torque (for a rover) of the reaction wheels in the Mk2 lander can,
if you use the the default key-bindings where the key for wheel-drive and also commands pitch down.
(Arguably, the wheel- controls should be I,J,K,L by default to save players the trouble of changing them.)
#2
 Updated by Anth12 almost 6 years ago
Updated by Anth12 almost 6 years ago
 Updated by
Updated by I saw this on the forums. Someone noted the navball is pointing into the sky.
I just tested this and I can confirm that if the control point is directed up that it will perform as you described.
If the control point is directed Forward then the rover will perform better though with reaction wheels 'on' it will be still a little weird to drive
A suggestion to Squad would be to have the control point be defaulted to Forward when its in the rover variant and Up when its circular.
Squad will most likely look at the subject for issues and find that the steering issue is not a bug.
#3
 Updated by Nebbie almost 6 years ago
Updated by Nebbie almost 6 years ago
 Updated by
Updated by - Category changed from Physics to Controls and UI
- Platform Linux added
- Expansion Core Game added
- Expansion deleted (
Making History)
KER reports no torque with an SRB placed under a replica of your example craft, so it's not center of mass.
Testing with reaction wheels set to SAS only (and SAS off) on the replica vehicle does show this behavior. In fact, it veers to the right going in reverse too (and regardless of initial orientation on the runway).
The behavior goes away when control orientation is changed so it no longer believes up to be forward. Thus, I suspect that the root cause of this is a very, very slight miscalculation of which direction up and down are when attempting to elevate/deelevate on a flat plane with wheels.
#4
Updated by Nebbie almost 6 years ago
- Subject changed from Mk2 Lander Can (Rover Variant) won't steer straight to Mk2 Lander Can (Rover Variant) veers to the right when moving forward/back with control orientation set to up
- Status changed from New to Confirmed
- % Done changed from 0 to 10
#5
Updated by Nebbie almost 6 years ago
- File screenshot707.png screenshot707.png added
- Subject changed from Mk2 Lander Can (Rover Variant) veers to the right when moving forward/back with control orientation set to up to Rovers veer to the right when moving forward/back with control point set to up
Behavior replicated with Probodobodyne Rovemate, it's definitely a small issue when you have the wrong control point.
#6
 Updated by purpleivan over 5 years ago
Updated by purpleivan over 5 years ago
 Updated by
Updated by 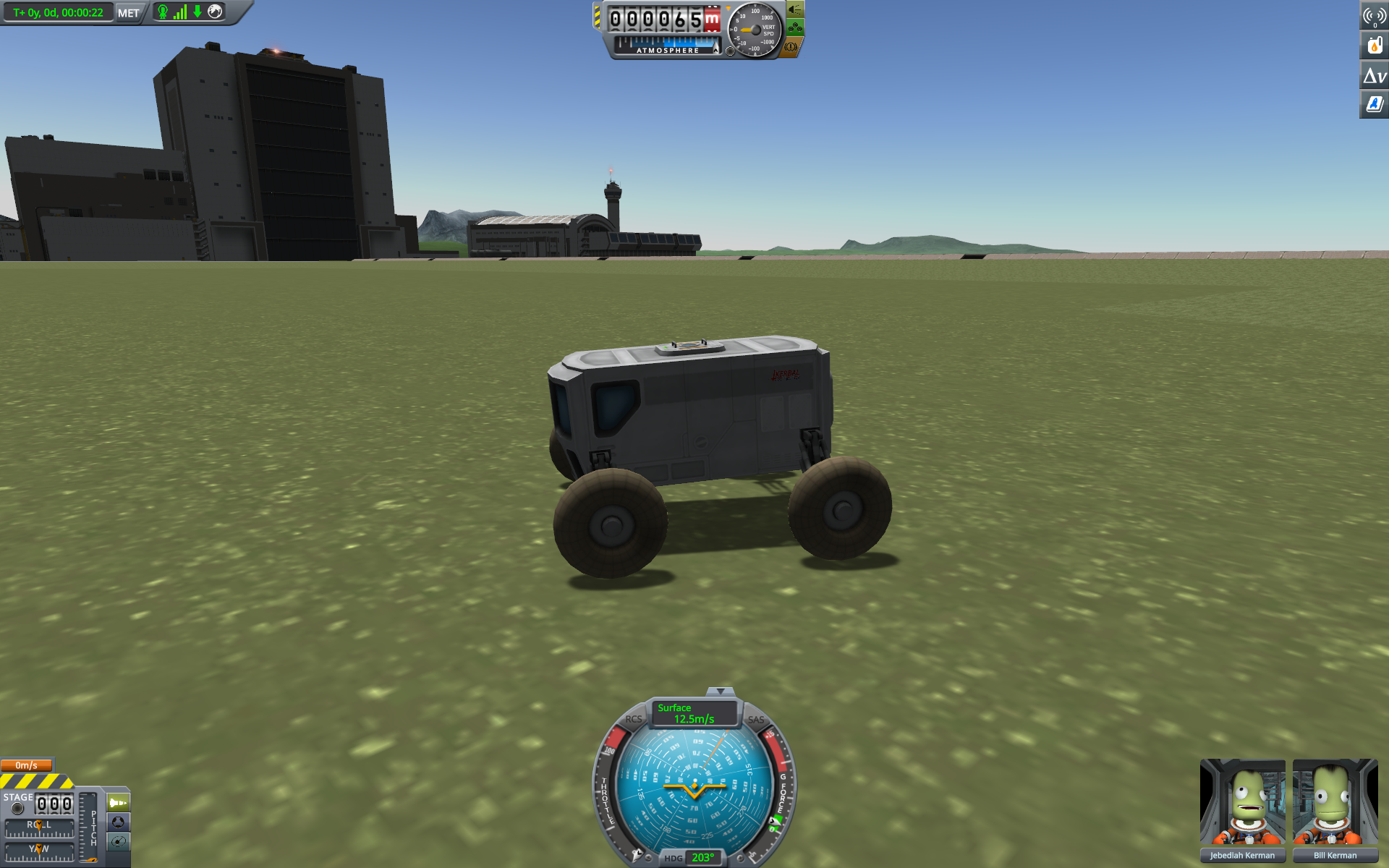{kind=link}
{kind=link}
{kind=link}
Just checked the bug tracker after a long time away from it and noticed the responses. The behaviour does still occur if the control point is set to forward, rather than up, just less so.
The craft file linked to below is for a very similar vehicle, which was constructed in the SPH with symetry on, so should be completely symetrical.
https://kerbalx.com/purpleivan/Rover-test
Once up to speed it turns through 45 degrees in 7 seconds on the flat ground around the KSC, with the only control input being forwards (W). I used the area to the left of the runway (opposite side to the VAB) when testing it.