Feedback #25966

strange physics of robotic parts (when 0kN) hinder the creation of more complex mechanisms
Description
The robotic parts do not have symmetry of tension / movement / angle when their motor power is 0kN and suffer equal external forces.
What happens: When trying to build a more complex mechanism like a chain of movements using more than one robotic part connected to each other, when a symmetrical x group (like 4 cylinders for example) with power in the 100kN engine apply a force in another group y (4 servos for example) also symmetrical but without power in their engines (0kN), the angles that each of these servos will reproduce will be different from each other (which I didn't expect because I was trying to build a helicopter rotor with a swashplate that was able to fly an aircraft ... but it ruined everything).
How to reproduce: Watch this video : https://youtu.be/0Q-rxxKDqsA or follow these steps:
Note: There are linked videos and attached images in addition to the "ships" used for the test.
1- Required parts: 4 1P2 Hydraulic Cylinder, 2 G-00 Hinge, 1 EAS-4 Strut Connector, 1 M-2x2 Structural Panel, 1 Probodobodyne OKTO2 and 3 Z-200 Rechargeable Battery Bank.
2- On the M-2x2 Structural Panel, build two radially symmetrical robotic arms, with 2 cylinders (1P2 Hydraulic Cylinder) on top of each other and a G-00 Hinge on them facing each other so that they can be connected with the EAS -4 Strut Connector. The battery and the control module must be exactly in the center of the structure.
3- After assembling everything and going out of the VAB to "fly", remove the symmetry and reduce the engine power of all parts except one of the G-00 Hinge, which will be the one that will do the first test, but remove the symmetry.
4- Try to change the angle of the 1 ° G-00 Hinge that is at 100kN (while the other is at 0kN) from 90 ° to 0 ° and observe the result.
5- Decrease the power of the 1st G-00 Hinge to 0kN and increase the power of the other to 100kN, do the same procedure in this one now and you will see the result comparing how much each one varied in angle.
Grades:
I've downloaded a lot of mods but nothing solves, it seems that nothing can stop this variation of angles without disturbing the mechanism of a functional swashplate. But these video tests were done entirely without mods. Maybe I'm just unable to create a decent rotor and I'm blaming the bugs and strange physics ...
Affected versions: Since the release of the Breaking Ground DLC (1.10)
I was trying to develop a type of swashplate, actually a helicopter rotor that would imitate a little bit of the real mechanism of a real one and allow the flight using the robotic parts added with the Breaking Ground DLC, but unfortunately I stopped in the middle of the journey that even building the project with the maximum possible symmetry, the robotic parts of which they need to have the motor power at 0kN so that they have free movement (to be moved by other rotor mechanisms, in a chain of movement) do not move with symmetry, each actually has a different displacement even though the force applied to it is the same everywhere. I would really be happy if one day it doesn't happen anymore.
I don't know if it's a bug or just a lot of calculations of external forces being applied like the wind for example. Anyway, so I thought it would be better to report why this interrupted my hobby as a rotor developer engineer with functional swasplates .... in the KSP of course.
Translated via google translator.
| Test 1 part 1.png (1.5 MB) Test 1 part 1.png | |||
| Test 1 Part 2.png (1.53 MB) Test 1 Part 2.png | |||
| Test 1 Part 3.png (1.7 MB) Test 1 Part 3.png | |||
| Test.craft (45.6 KB) Test.craft | |||
| Test 2.craft (146 KB) Test 2.craft | |||
| Test 3.craft (309 KB) Test 3.craft |



History
#1
 Updated by [email protected] over 3 years ago
Updated by [email protected] over 3 years ago
 Updated by
Updated by 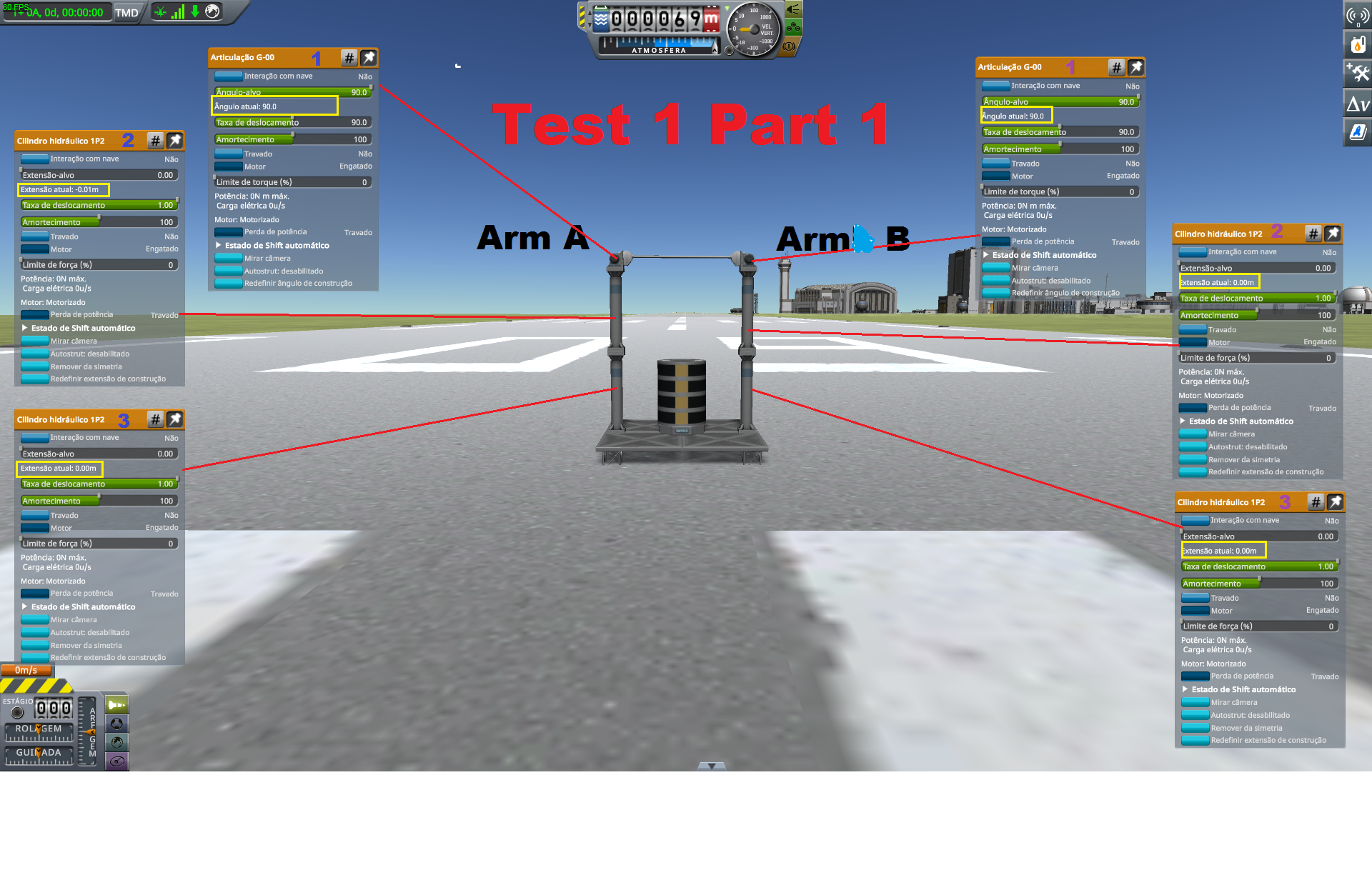{kind=link}
{kind=link}
{kind=link}
Confirmed. If you have robotics Part locked, and motor disabled, Part isnt locked but moves freely, which i don't think is supposed to happen. Hard to do any helicopters or anything with current wobbly physics.